|
I received the Ph.D. degree at the Department of Electronic Engineering in Tsinghua University, Beijing, China in June 2020. I had been pursuing my Ph.D. degree since 2015 in Institute of Information Cognition & Intelligent System, Tsinghua University under the supervision of Prof. Li Zhang. Before that, I received the B.Eng. degree in Electronic Engineering from Tsinghua University in 2013. I worked as an intern at Tencent Autonomous Driving Center during the summer of 2019. |

|
|
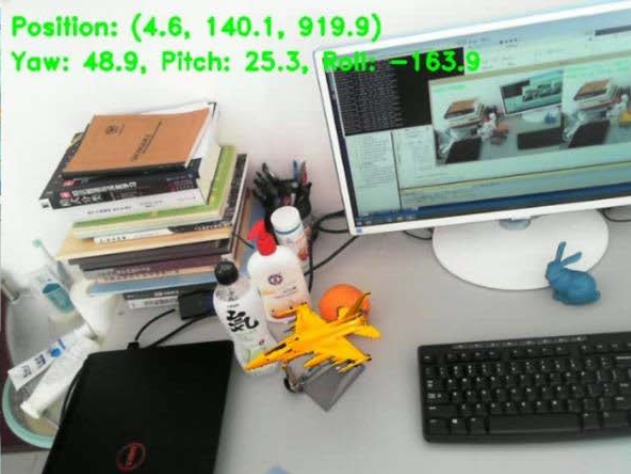
My research interests include 3D computer vision, robotic vision, augmented reality, computer graphics and machine learning. I am currently mainly working on robust 3D object pose estimation and tracking. |
|
Leisheng Zhong et al IEEE Access, 2022 |
|
An Chang, Yu Zhang, Shunli Zhang, Leisheng Zhong, Li Zhang Knowledge-Based Systems, 2022 |

|
Leisheng Zhong, Yu Zhang, Hao Zhao, An Chang, Wenhao Xiang, Shunli Zhang, Li Zhang IEEE Robotics and Automation Letters (RA-L), 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020 preprint / bibtex |

|
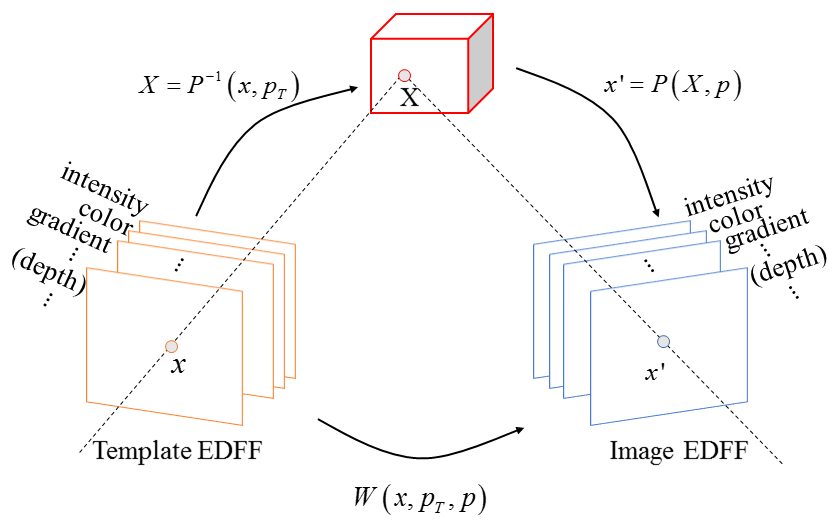
Leisheng Zhong, Xiaolin Zhao, Yu Zhang, Shunli Zhang, Li Zhang IEEE Transactions on Image Processing (TIP), 2020 preprint / bibtex |
|
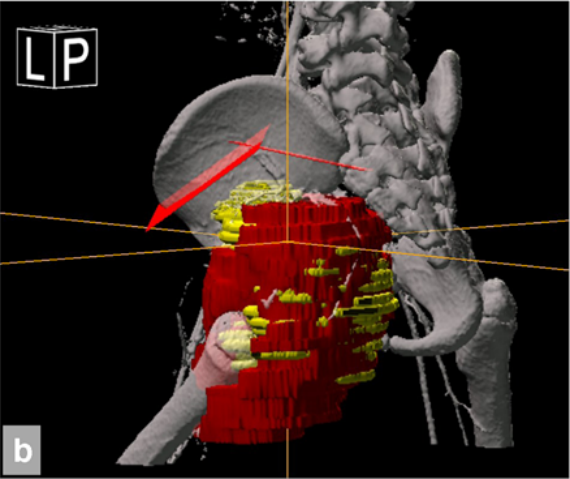
Yu Zhang, Qing Zhang, Leisheng Zhong, Lei Qiu, Lihui Xu, Yang Sun, Xiaohui Niu, Li Zhang International Orthopaedics, 2020 bibtex |
|
Leisheng Zhong, Li Zhang International Journal of Computer Vision (IJCV), 2019 preprint / bibtex |
|
Leisheng Zhong, Ming Lu, Li Zhang IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2018 preprint / poster / bibtex |
|
|
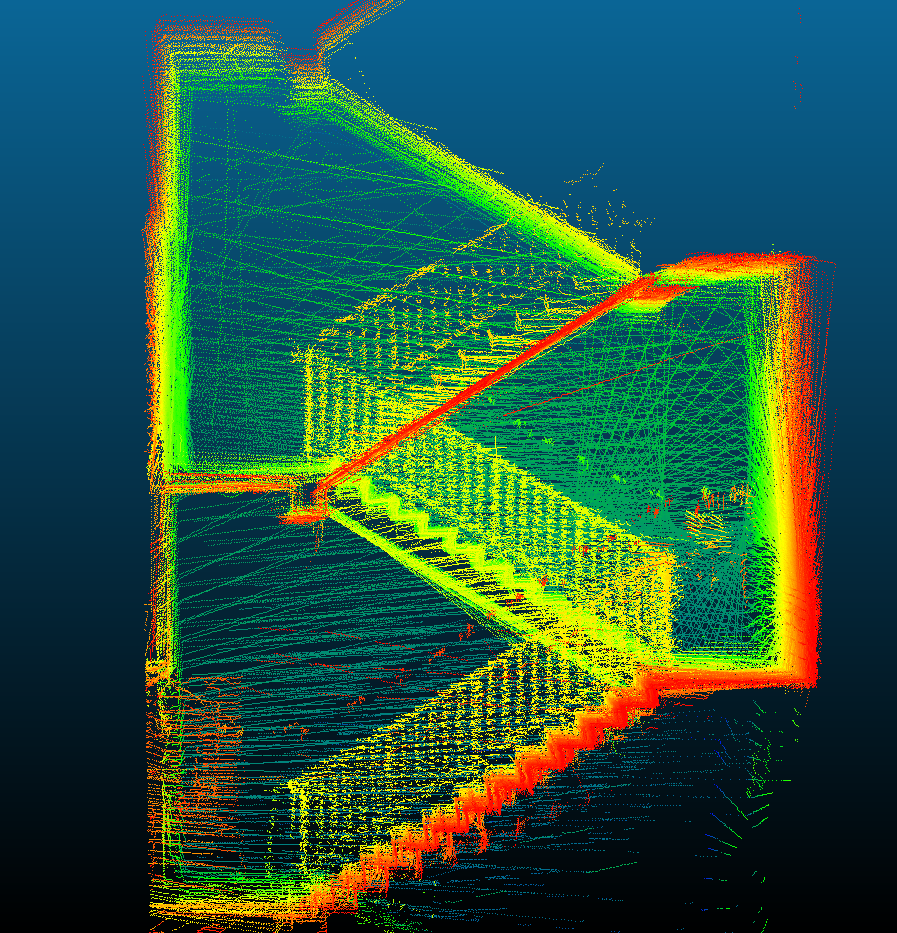 |
We build a Simultaneously Localization and Mapping (SLAM) system based on a line-scan Lidar and two cameras. poster / video: youtube youku |
 |
Some Augmented Reality (AR) demos based on our research about 3D object tracking. video: youtube youku |
 |
Our 3D object pose tracking algorithm makes it possible to paint on the surface of 3D models, instead of on 2D papers. video: youtube youku |
|
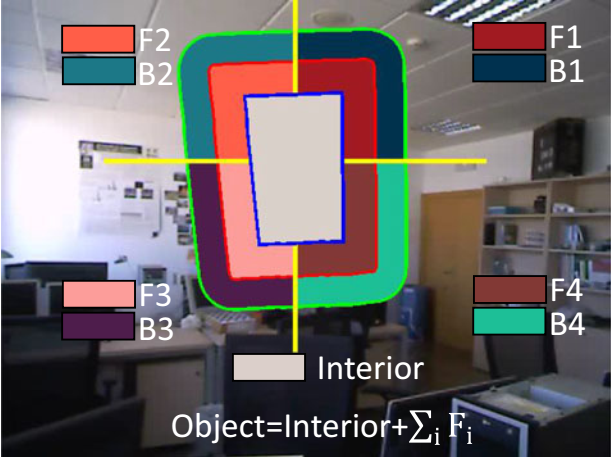
Very fast occlusion-aware 6-DOF object pose tracking based on edge distance fields. Objects could be tracked with only ~100 edge points. video: youtube youku |
 |
We assemble a webcam to a commercial robot arm (uArm swift pro) and develop some demo applications, including automatic pick-and-place, laser engraving, 3D printing, planar target tracking, and the simulation of air refueling. video: youtube youku |
|
|
|
Outstanding Graduates of Beijing, 2020
|
|
The source code of this website is adapted from this page. |